see http://www.symmttm.com/info_center_white_papers.asp
A BRIEF PRIMER ON IEEE 1588 PRECISE TIME PROTOCOL
The recently developed IEEE 1588 Precise Time Protocol (PTP) promises to revolutionize time synchronization by improving accuracy and reducing cost. While certain other precise sync protocols require significant investment in hardware and cabling, PTP makes highly precise timekeeping possible using the most widely deployed medium for network connectivity – Ethernet.
While Ethernet has proven to be a ubiquitous and inexpensive medium for connectivity, it has not been well-suited for applications requiring precise synchronization. By nature Ethernet is nondeterministic, which creates difficulty for real-time or time sensitive applications that require synchronization. On an NTP-based LAN, network devices and computer operating systems add latency and jitter that reduces synchronization accuracy to 1 to 2 milliseconds. Applications requiring greater accuracy have often had to deploy separate cabling systems and dedicated clocks – the IRIG B protocol, for instance, requires a dedicated system of coaxial cables to carry timing signals directly between IRIG B clocks separate from any data network.
PTP overcomes the Ethernet latency and jitter issues through hardware time stamping at the physical layer of the network. The result can be an unprecedented accuracy in the 10 to 100 nanosecond range that is achieved using an Ethernet network to carry the timing packets, allowing for remarkable cost savings.
NTP vs. IRIG vs. PTP
NTP has been the most common and arguably the most popular synchronization solution because it performs well over LANs and WANs and is relatively inexpensive to implement, requiring little in the way of hardware. And while NTP should be able to deliver accuracy of 1 – 2 milliseconds on a LAN or 1 – 20 milliseconds on a WAN, this is far from guaranteed network-wide. This is largely due to the use of switches and routers on LANs and WANs and the fact that many NTP clients run on non-real-time operating systems such as Windows or Linux, that were not designed for time keeping accuracy and therefore rarely deliver it. On Windows, for instance, one can often witness clock corrections of 10 – 50 milliseconds because the system was busy performing tasks it deemed more important than timekeeping.
IRIG time code provides increased accuracy – up to 1–10 microseconds – and is often used where precision timing is mission critical: in military, aerospace and power utility instrumentation. But improved accuracy comes at a cost. IRIG systems eschew Ethernet in favor of dedicated coaxial timing cabling between dedicated hardware clocks, which are not only an added expense but which create an extra burden on the physical infrastructure of the facility.
PTP, on the other hand, offers the cost effectiveness of NTP by using existing Ethernet LANs, and it exceeds the accuracy of the IRIG clocks. PTP can coexist with normal network traffic on a standard Ethernet LAN using regular hubs and switches, and yet provides synchronization accuracy to the sub microsecond level. With the addition of IEEE 1588 boundary clocks or transparent switches, 20-100 nanosecond synchronization accuracy is achievable. The key to this caliber of performance is hardware assisted time stamping.
PTP Usage
Because of its precision, cost-effectiveness and ease-of-use, PTP can be expected to be widely used in military and aerospace applications. Systems that are deployed in military theater situations to identify enemy threats can be constructed from ad hoc Ethernet networks that connect a variety of sensors. Sonar systems in submarines can improve acoustic intercept and ranging accuracy by deploying PTP time stamp technology close to the sensors. And PTP is replacing IRIG systems in aircraft flight test because it provides tighter sync and eliminates the need for additional cabling.
The Future of PTP
PTP has justifiably received considerable attention since its introduction in 2002, and its influence is growing. A variety of vendors are producing hardware that supports PTP, including Intel, which has recently embedded an IEEE 1588 Time Stamping Unit into one of its networking microprocessors. The next version of the 1588 protocol is currently being defined and is expected to increase accuracy even more. And improved fault tolerance and compatibility with SNMP are expected to enhance PTP interoperability with existing network infrastructure. With its nanosecond accuracy, ease-of-deployment, and cost-effectiveness, PTP is poised to transform the landscape of time-synchronized applications in any number of fields.
************************************
During this offset correction, the master cyclically transmits a unique synchronization (SYNC) message to the related slave clocks at defined intervals (by default every 2 seconds). This sync message contains an estimated value for the exact time the message was transmitted.
For highly accurate synchronization a mechanism is now provided that determines the time of transmission and reception of PTP messages as precisely and as closely as possible to the hardware, best of all directly on the medium.
The master clock measures the exact time of transmission TM1 and the slave clocks measure the exact times of reception TS1. The master then sends in a second message, the follow-up message, the exact time of transmission TM1 of the corresponding sync message to the slave clocks.
On reception of the sync message and, for increased accuracy, on reception of the corresponding follow-up message, the slave clock calculates the correction (offset) in relation to the master clock taking into account the reception time stamp of the sync message. The slave clock Ts must then be corrected by this offset. If there were to be no delay over the transmission path, both clocks would now be synchronous.
The second phase of the synchronization process, the delay measurement, determines the delay or latency between slave and master. For this purpose the slave clock sends a so-called "delay request" packet to the master and during this process determines the exact time of transmission of the message TS3. The master generates a time stamp on reception of the packet and sends the time of reception TM3 back to the slave in a "delay response" packet.
From the local time stamp for transmission TS3 and the time stamp for reception provided by the master TM3, the slave calculates the delay time between slave and master.
The delay measurement is performed irregularly and at larger time intervals (random value between 4 and 60 seconds by default) than the offset measurement. In this way, the network, and particularly the terminal devices, are not too heavily loaded. However, a symmetrical delay between master and slave is crucial for the delay measurement and its precision, i.e. same value for both directions.
Using this synchronization process, timing fluctuations in the PTP elements especially the protocol stack and the latency time between the master and slave are eliminated.
This is from http://www.ieee1588.com/, written by our friends at Hirschmann:
1. IEEE 1588 - Precise Time Synchronization as the Basis for Real Time Applications in Automation
More and more data can be transferred and processed in shorter and shorter time. This trend is observed in automation technology.
Because of this, Ethernet has been chosen as the transport technology for the foreseeable future. Beside speed of transmission and ease of setup, the words “real time” have a special meaning in this field. A substantial facet is precise time synchronization of different end devices.
With the Precision Time Protocol IEEE 1588 there is now, for the first time, a standard available which makes it possible to synchronize the clocks of different end devices over a network at speeds faster than one microsecond.
This article is written to supply answers to several questions: how this protocol works, how to use and implement it, and what results you can expect.
Because of this, Ethernet has been chosen as the transport technology for the foreseeable future. Beside speed of transmission and ease of setup, the words “real time” have a special meaning in this field. A substantial facet is precise time synchronization of different end devices.
With the Precision Time Protocol IEEE 1588 there is now, for the first time, a standard available which makes it possible to synchronize the clocks of different end devices over a network at speeds faster than one microsecond.
This article is written to supply answers to several questions: how this protocol works, how to use and implement it, and what results you can expect.
2. Real-time
If hard real-time requirements are to be met, then the communication system must be able to guarantee deterministic behavior. This means always being able to exchange the required amount of data within a predefined time and the ability to provide mechanisms to synchronize all participants very precisely.
Today only a few special field buses or other proprietary solutions are suitable for achieving cycle times of less than one millisecond or jitter values in the range of a microsecond. To be able to continue the trend towards using Ethernet for networking in automation systems, special measures were created whereby Ethernet can guarantee the required determinism.
There is a degree of variance in Ethernet propagation times during transmission. A solution to guarantee deterministic system behavior is to have a precise clock in all terminal devices synchronized with all other systems. If actions are referred to such a high precision clock, then the process can be decoupled from the propagation times of the communication.
This issue applies particularly to co-operating systems that must start specific actions simultaneously. An example is several robots that work together on one task, e.g. the transport of heavy objects, something that can only function if the movements of the robots are very precisely matched to each other.
If hard real-time requirements are to be met, then the communication system must be able to guarantee deterministic behavior. This means always being able to exchange the required amount of data within a predefined time and the ability to provide mechanisms to synchronize all participants very precisely.
Today only a few special field buses or other proprietary solutions are suitable for achieving cycle times of less than one millisecond or jitter values in the range of a microsecond. To be able to continue the trend towards using Ethernet for networking in automation systems, special measures were created whereby Ethernet can guarantee the required determinism.
There is a degree of variance in Ethernet propagation times during transmission. A solution to guarantee deterministic system behavior is to have a precise clock in all terminal devices synchronized with all other systems. If actions are referred to such a high precision clock, then the process can be decoupled from the propagation times of the communication.
This issue applies particularly to co-operating systems that must start specific actions simultaneously. An example is several robots that work together on one task, e.g. the transport of heavy objects, something that can only function if the movements of the robots are very precisely matched to each other.
3. IEEE1588
The new IEEE Standard Precision Time Protocol (PTP) IEEE1588 is now a very comprehensive solution to do very precise time synchronization in an Ethernet network.
The protocol was originally developed by Agilent for distributed instrumentation and control tasks. The technique is based on the work of John Eidson, who, as chairman of the standardization committee, is largely responsible for the approval of the standard in November 2002.
Using IEEE1588, it is possible for the first time to synchronize, in the sub-microsecond range, the local clocks in sensors, actuators, and other terminal devices using the same Ethernet network that also transports the process data.
Without such a standardized synchronization protocol, which is defined to be used with any protocol, not just Ethernet, it would probably not be possible to synchronize local clocks in terminal devices from different manufacturers with this precision.
Existing time synchronization protocols such as NTP and SNTP do not achieve the required synchronization accuracy or the convergence speed. Others, such as SynUTC from the Technical University in Vienna, were not accepted on the market.
Like other protocols, PTP is based on the most precise matching of times when synchronization packets are transmitted and received possible. Unlike SNTP, the transmission time stamp does not need to be transmitted in the synchronization packet itself, as described in detail below, but is transmitted in a following packet. In this way measurement of transmission and reception, and transmission of measured time stamps can be decoupled.
The protocol was designed for small homogeneous and heterogeneous local networks. The designers paid particular attention to low resource usage so that the protocol can also be used in low end and low cost terminal devices. No special requirements are placed on memory or CPU performance, and only minimal network bandwidth is needed. The low administration effort for this protocol is also significant. As redundant masters are also supported, a PTP domain automatically configures itself using the best master clock algorithm and is also fault-tolerant.
The most important characteristic of the protocol is the synchronism in the microsecond and sub-microsecond range.
The new IEEE Standard Precision Time Protocol (PTP) IEEE1588 is now a very comprehensive solution to do very precise time synchronization in an Ethernet network.
The protocol was originally developed by Agilent for distributed instrumentation and control tasks. The technique is based on the work of John Eidson, who, as chairman of the standardization committee, is largely responsible for the approval of the standard in November 2002.
Using IEEE1588, it is possible for the first time to synchronize, in the sub-microsecond range, the local clocks in sensors, actuators, and other terminal devices using the same Ethernet network that also transports the process data.
Without such a standardized synchronization protocol, which is defined to be used with any protocol, not just Ethernet, it would probably not be possible to synchronize local clocks in terminal devices from different manufacturers with this precision.
Existing time synchronization protocols such as NTP and SNTP do not achieve the required synchronization accuracy or the convergence speed. Others, such as SynUTC from the Technical University in Vienna, were not accepted on the market.
Like other protocols, PTP is based on the most precise matching of times when synchronization packets are transmitted and received possible. Unlike SNTP, the transmission time stamp does not need to be transmitted in the synchronization packet itself, as described in detail below, but is transmitted in a following packet. In this way measurement of transmission and reception, and transmission of measured time stamps can be decoupled.
The protocol was designed for small homogeneous and heterogeneous local networks. The designers paid particular attention to low resource usage so that the protocol can also be used in low end and low cost terminal devices. No special requirements are placed on memory or CPU performance, and only minimal network bandwidth is needed. The low administration effort for this protocol is also significant. As redundant masters are also supported, a PTP domain automatically configures itself using the best master clock algorithm and is also fault-tolerant.
The most important characteristic of the protocol is the synchronism in the microsecond and sub-microsecond range.
4. Many groups are interested in IEEE1588
The biggest interest in determinist Ethernet currently is found in automation; especially motion control applications. Many drive manufactures are equipping their devices with Ethernet interfaces, but now have problems synchronizing all connected drives as precisely as possible over the network.
Several groups of this industrial sector have decided to use this protocol in their Ethernet based field busses. The ODVA has decided to use IEEE1588 for CIPSync, the real-time extension for Ethernet/IP - CIP. Siemens is working on a modification of IEEE1588 for Profinet V3. Also solutions by Beckhoff and Jetter are being developed to ensure time synchronization with this protocol or a similar approach. Likewise the EPSG (Ethernet Powerlink Standardization Group) has planned this protocol as a firm component of the version 3 of their specification.
But interest is not only coming from the automation industry. Increasing demand is growing out of test and measurement; the origin of this protocol. Also initial projects have been started to use IEEE1588 for military applications. Other groups which show interest are coming from telecommunications and electrical power distribution (IEC61850 -Communication networks and systems in substations).
Before we focus on initial results, a short overview of the function of this protocol is given.
Several groups of this industrial sector have decided to use this protocol in their Ethernet based field busses. The ODVA has decided to use IEEE1588 for CIPSync, the real-time extension for Ethernet/IP - CIP. Siemens is working on a modification of IEEE1588 for Profinet V3. Also solutions by Beckhoff and Jetter are being developed to ensure time synchronization with this protocol or a similar approach. Likewise the EPSG (Ethernet Powerlink Standardization Group) has planned this protocol as a firm component of the version 3 of their specification.
But interest is not only coming from the automation industry. Increasing demand is growing out of test and measurement; the origin of this protocol. Also initial projects have been started to use IEEE1588 for military applications. Other groups which show interest are coming from telecommunications and electrical power distribution (IEC61850 -Communication networks and systems in substations).
Before we focus on initial results, a short overview of the function of this protocol is given.
5. How does the IEEE1588 protocol work?
The basic function is that the most precise clock on the network synchronizes all other users. A clock with only one network port is termed an ordinary clock. There are two clocks, Master and Slave. In principle any clock can perform both the master and slave function.
The precision of a clock, more exactly stated of their time sources, is categorized by the protocol in classes (stratum). Here the highest class is an atomic clock which has the stratum value 1. The selection of the best clock in the network is performed automatically using the best master clock algorithm.
The precision of the synchronization depends very heavily on the network and the components used in the network. For this reason the transition over less deterministic components, e.g. routers and switches, is also made possible by the protocol using the boundary clock.
For the administration and configuration of clocks in the network, there is also a management protocol available.
PTP is based on IP multicast communication and is not restricted to Ethernet, but can be used on any bus system that supports multicasting. Multicast communication offers the advantage of simplicity; IP address administration does not need to be implemented on the PTP nodes. Furthermore, PTP can thus be scaled for a large number of PTP nodes.
The basic function is that the most precise clock on the network synchronizes all other users. A clock with only one network port is termed an ordinary clock. There are two clocks, Master and Slave. In principle any clock can perform both the master and slave function.
The precision of a clock, more exactly stated of their time sources, is categorized by the protocol in classes (stratum). Here the highest class is an atomic clock which has the stratum value 1. The selection of the best clock in the network is performed automatically using the best master clock algorithm.
The precision of the synchronization depends very heavily on the network and the components used in the network. For this reason the transition over less deterministic components, e.g. routers and switches, is also made possible by the protocol using the boundary clock.
For the administration and configuration of clocks in the network, there is also a management protocol available.
PTP is based on IP multicast communication and is not restricted to Ethernet, but can be used on any bus system that supports multicasting. Multicast communication offers the advantage of simplicity; IP address administration does not need to be implemented on the PTP nodes. Furthermore, PTP can thus be scaled for a large number of PTP nodes.
6. Time synchronization
Every slave synchronizes to its master's clock by exchanging synchronization messages with the master clock.
The synchronization process is divided into two phases. First the time difference between master and slave is corrected; this is the offset measurement.
Every slave synchronizes to its master's clock by exchanging synchronization messages with the master clock.
The synchronization process is divided into two phases. First the time difference between master and slave is corrected; this is the offset measurement.

During this offset correction, the master cyclically transmits a unique synchronization (SYNC) message to the related slave clocks at defined intervals (by default every 2 seconds). This sync message contains an estimated value for the exact time the message was transmitted.
For highly accurate synchronization a mechanism is now provided that determines the time of transmission and reception of PTP messages as precisely and as closely as possible to the hardware, best of all directly on the medium.
The master clock measures the exact time of transmission TM1 and the slave clocks measure the exact times of reception TS1. The master then sends in a second message, the follow-up message, the exact time of transmission TM1 of the corresponding sync message to the slave clocks.
On reception of the sync message and, for increased accuracy, on reception of the corresponding follow-up message, the slave clock calculates the correction (offset) in relation to the master clock taking into account the reception time stamp of the sync message. The slave clock Ts must then be corrected by this offset. If there were to be no delay over the transmission path, both clocks would now be synchronous.
The second phase of the synchronization process, the delay measurement, determines the delay or latency between slave and master. For this purpose the slave clock sends a so-called "delay request" packet to the master and during this process determines the exact time of transmission of the message TS3. The master generates a time stamp on reception of the packet and sends the time of reception TM3 back to the slave in a "delay response" packet.
From the local time stamp for transmission TS3 and the time stamp for reception provided by the master TM3, the slave calculates the delay time between slave and master.
The delay measurement is performed irregularly and at larger time intervals (random value between 4 and 60 seconds by default) than the offset measurement. In this way, the network, and particularly the terminal devices, are not too heavily loaded. However, a symmetrical delay between master and slave is crucial for the delay measurement and its precision, i.e. same value for both directions.
Using this synchronization process, timing fluctuations in the PTP elements especially the protocol stack and the latency time between the master and slave are eliminated.
7. PTP reference architecture, or how to build a PTP synchronization element
As previously mentioned, what is so special about the architecture is the separation of the time-critical part which is implemented in hardware and the protocol itself and is decoupled from hard real-time conditions - the software part. Thus the protocol is running in a low priority process and/or on a processor with low performance requirements.
The hardware unit consists of a highly precise real-time clock and a time stamp unit (TSU) to generate the time stamp. The software part implements the actual IEEE1588 protocol with the binding to the real-time clock and the HW time stamp unit. Figure 3 illustrates a co-operating of the hard and software component of a IEEE1588 synchronization element.
As previously mentioned, what is so special about the architecture is the separation of the time-critical part which is implemented in hardware and the protocol itself and is decoupled from hard real-time conditions - the software part. Thus the protocol is running in a low priority process and/or on a processor with low performance requirements.
The hardware unit consists of a highly precise real-time clock and a time stamp unit (TSU) to generate the time stamp. The software part implements the actual IEEE1588 protocol with the binding to the real-time clock and the HW time stamp unit. Figure 3 illustrates a co-operating of the hard and software component of a IEEE1588 synchronization element.
The intention of the presented architecture supports an almost OS independent modeling of the software component.
In order to reach this, we introduced three layers with different abstraction level. The Protocol Layer implements the operating system independent Precision Time Protocol. The OS Abstraction Layer forms the interface between PTP and the selected operating system. The functions made available by the operating system - tasks/processes, semaphores, timers, sockets, etc. - are merged over the OS Layer. The following figure shows the interaction of the individual layers.
In order to reach this, we introduced three layers with different abstraction level. The Protocol Layer implements the operating system independent Precision Time Protocol. The OS Abstraction Layer forms the interface between PTP and the selected operating system. The functions made available by the operating system - tasks/processes, semaphores, timers, sockets, etc. - are merged over the OS Layer. The following figure shows the interaction of the individual layers.
The highest layer implements PTP for the synchronization of clocks in a network and can be used on different communication elements (PC, switch, router, etc..). Here is the actual intelligence located for synchronizing the individual communication elements. Within the Protocol Layer we used only ANSI/ISO C conformal functions, thus you can easily transfer the protocol without deep interference into the functionality on different platforms. The protocol dispatchers ensures the atomic execution of functions during an individual process. Communication between the protocol and the OS Abstraction Layer has been realized by a queue and three well defined interfaces.
The middle layer encases operating system dependent functions, which one must adapt, if necessary.
The Timestamp Interface provides the Precision Time Protocol with the seized time stamps of the Sync and Delay-Request messages. However depending upon the stage of development (precision requirement) either a HW unit (TSU) or the software generates the time stamps. The best way to generate "software time stamps” is in the operating system dependent NIC drivers (RX- ISR, sends process) - as near as possible at the transportation medium.
Over the Clock Interface you read and modify the local clock. You have also to adapt these functions depending upon platform. Realizations, which do not have a hard real-time clock, use the system clock of the operating system or optimized solutions as for example the nano-kernel under UNIX derivatives. Apart from setting the local clock, this interface contains the control algorithms which are responsible for the quality of time synchronization [accuracy, stability, transient behavior, etc.].
The Port Interface is used to dispatch and/or receive PTP messages. The IEEE1588 telegrams use excluding UDP/IP multicast packets and thus make it possible to send and receive them over the socket interface of the IP protocol stack. One may neglect temporal requirements, since the time stamps are generated directly at transport medium. The inputs to the protocol (configuration, diagnosis, PTP packets) run over the PTP API.
This modular software platform made it possible for us to build implementations of this protocol for Linux, Windows and VxWorks. The implementations in Windows and Linux use time stamping in software. But even a pure software implementation reaches a precision of about 100 µs, and it seems to be possible to increase this up to a precision of better than 10 µs.
The middle layer encases operating system dependent functions, which one must adapt, if necessary.
The Timestamp Interface provides the Precision Time Protocol with the seized time stamps of the Sync and Delay-Request messages. However depending upon the stage of development (precision requirement) either a HW unit (TSU) or the software generates the time stamps. The best way to generate "software time stamps” is in the operating system dependent NIC drivers (RX- ISR, sends process) - as near as possible at the transportation medium.
Over the Clock Interface you read and modify the local clock. You have also to adapt these functions depending upon platform. Realizations, which do not have a hard real-time clock, use the system clock of the operating system or optimized solutions as for example the nano-kernel under UNIX derivatives. Apart from setting the local clock, this interface contains the control algorithms which are responsible for the quality of time synchronization [accuracy, stability, transient behavior, etc.].
The Port Interface is used to dispatch and/or receive PTP messages. The IEEE1588 telegrams use excluding UDP/IP multicast packets and thus make it possible to send and receive them over the socket interface of the IP protocol stack. One may neglect temporal requirements, since the time stamps are generated directly at transport medium. The inputs to the protocol (configuration, diagnosis, PTP packets) run over the PTP API.
This modular software platform made it possible for us to build implementations of this protocol for Linux, Windows and VxWorks. The implementations in Windows and Linux use time stamping in software. But even a pure software implementation reaches a precision of about 100 µs, and it seems to be possible to increase this up to a precision of better than 10 µs.
8. IEEE1588 and Switches
The precision of the protocol also depends on the latency jitter of the underlying network topology. Point to point connections provide the highest precision, with hubs imposing very little network jitter. Under very low or no network load, Layer 2 switches have a very low processing time, typically 2 to 10µs plus packet reception time. In this case, new switch designs also have low latency jitter e.g. the Hirschmann Switch RS2-FX/FX with about 0.4 µs latency jitter.
But switches are working with queues and store and forward, so only one queued maximum length packet imposes a delay for the following packet of about 122µs, and under high load conditions, more than one packet will be in the queue. The next issue for the precision of the protocol is that latency is completely symmetric for both directions: from the master to the slave and visa verse. This can nearly never be guaranteed under higher network loads.
Prioritization of packets e.g. IEEE802.1D/p does not really solve the problem, because at least one long packet can be in front of a synchronization packet and so will impose up to 122µs to the jitter of transmission. Currently, available switches show that after the priority scheduler, there is another queue for 2 up to 8 packets, and not only one as expected. This means a jitter from 360µs up to 1ms under heavy load conditions.
The solution for all these problems is the usage of IEEE 1588 Boundary clocks in switches. In this case you only have point to point connections and there is nearly no delay jitter between master clock and slave clock and internal queuing delay/jitter of switches is not relevant any more.
The precision of the protocol also depends on the latency jitter of the underlying network topology. Point to point connections provide the highest precision, with hubs imposing very little network jitter. Under very low or no network load, Layer 2 switches have a very low processing time, typically 2 to 10µs plus packet reception time. In this case, new switch designs also have low latency jitter e.g. the Hirschmann Switch RS2-FX/FX with about 0.4 µs latency jitter.
But switches are working with queues and store and forward, so only one queued maximum length packet imposes a delay for the following packet of about 122µs, and under high load conditions, more than one packet will be in the queue. The next issue for the precision of the protocol is that latency is completely symmetric for both directions: from the master to the slave and visa verse. This can nearly never be guaranteed under higher network loads.
Prioritization of packets e.g. IEEE802.1D/p does not really solve the problem, because at least one long packet can be in front of a synchronization packet and so will impose up to 122µs to the jitter of transmission. Currently, available switches show that after the priority scheduler, there is another queue for 2 up to 8 packets, and not only one as expected. This means a jitter from 360µs up to 1ms under heavy load conditions.
The solution for all these problems is the usage of IEEE 1588 Boundary clocks in switches. In this case you only have point to point connections and there is nearly no delay jitter between master clock and slave clock and internal queuing delay/jitter of switches is not relevant any more.
9. Test results
In the beginning, we directly connected in our test setup two Ordinary Clocks. We used IEEE1588 enhanced plug-in modules on our modular Ethernet switches (MICE series). To put the protocol through its paces, we added a high network load with an Ethernet packet generator.
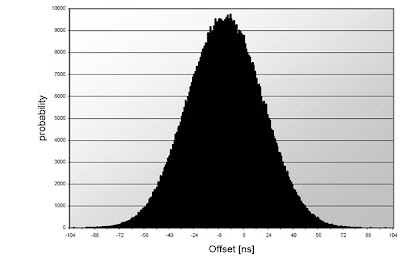
So that we could examine the difference between local clock and reference clock as close-to-applications as possible, we enhanced both units with a Pulses Per Second (PPS) signal output and connected them to an oscilloscope. Thus we could seize now very elegantly the deviation of the two signals and also represent the frequency distribution of the deviation. The synchronization accuracy which we reached lay within ± 100 ns (max. jitter). The measurement ran for a period of 84 hours.
In the beginning, we directly connected in our test setup two Ordinary Clocks. We used IEEE1588 enhanced plug-in modules on our modular Ethernet switches (MICE series). To put the protocol through its paces, we added a high network load with an Ethernet packet generator.
So that we could examine the difference between local clock and reference clock as close-to-applications as possible, we enhanced both units with a Pulses Per Second (PPS) signal output and connected them to an oscilloscope. Thus we could seize now very elegantly the deviation of the two signals and also represent the frequency distribution of the deviation. The synchronization accuracy which we reached lay within ± 100 ns (max. jitter). The measurement ran for a period of 84 hours.
The following figure shows the frequency distribution of the offset values between master clock and slave clock in nanoseconds. The standard deviation amounts to 23.95 ns and the average value -4.248 ns.
The drift values of the oscillators limits the synchronization accuracy with the available prototypes. Quartz frequency of 50 MHz (± 50 ppm) results in a dissolution of 20 ns. Thus the system can adjust the drift within the range of ± 20 ns per second. If you now regard the relative drift between the local clock and the master clock during two other following synchronization telegrams, then it becomes clear that the short-term stability of the oscillators substantially determines the synchronization accuracy in the in-swing condition.
10. Conclusion
The Precision Time Protocol standardized in IEEE1588 reaches synchronization accuracy within the sub-microsecond range and has further potential for higher precision. It is suited for applications which need a time synchronization of distributed clocks of highest accuracy in a limited network domain.
Many manufacturers have already begun the development of appropriate components and have already started to evaluate their first prototypes.
For high precision in a switched Ethernet network, it is recommended to equip switches with IEEE1588 technology.
The PTP reference architecture introduced in this article tries to unite the advantages of equipment modularity and scalability.
The Precision Time Protocol standardized in IEEE1588 reaches synchronization accuracy within the sub-microsecond range and has further potential for higher precision. It is suited for applications which need a time synchronization of distributed clocks of highest accuracy in a limited network domain.
Many manufacturers have already begun the development of appropriate components and have already started to evaluate their first prototypes.
For high precision in a switched Ethernet network, it is recommended to equip switches with IEEE1588 technology.
The PTP reference architecture introduced in this article tries to unite the advantages of equipment modularity and scalability.
About the author:
Dirk S. Mohl is currently head of development for Industrial Ethernet products at Hirschmann Automation and Control, Germany. He received a Diploma of Engineering degree in Electrical Engineering from the Technical University of Stuttgart, Germany, in 1991. He started work in 1992 at Hirschmann in the Networking Department as a hardware and software development engineer. His main interest is Ethernet and Switching (Layer 2 and Layer 3) with focus on industrial applications.
Dirk S. Mohl is currently head of development for Industrial Ethernet products at Hirschmann Automation and Control, Germany. He received a Diploma of Engineering degree in Electrical Engineering from the Technical University of Stuttgart, Germany, in 1991. He started work in 1992 at Hirschmann in the Networking Department as a hardware and software development engineer. His main interest is Ethernet and Switching (Layer 2 and Layer 3) with focus on industrial applications.
No comments:
Post a Comment